AGV Scheduling of Material Handling Systems
Summary
 |
 |
-
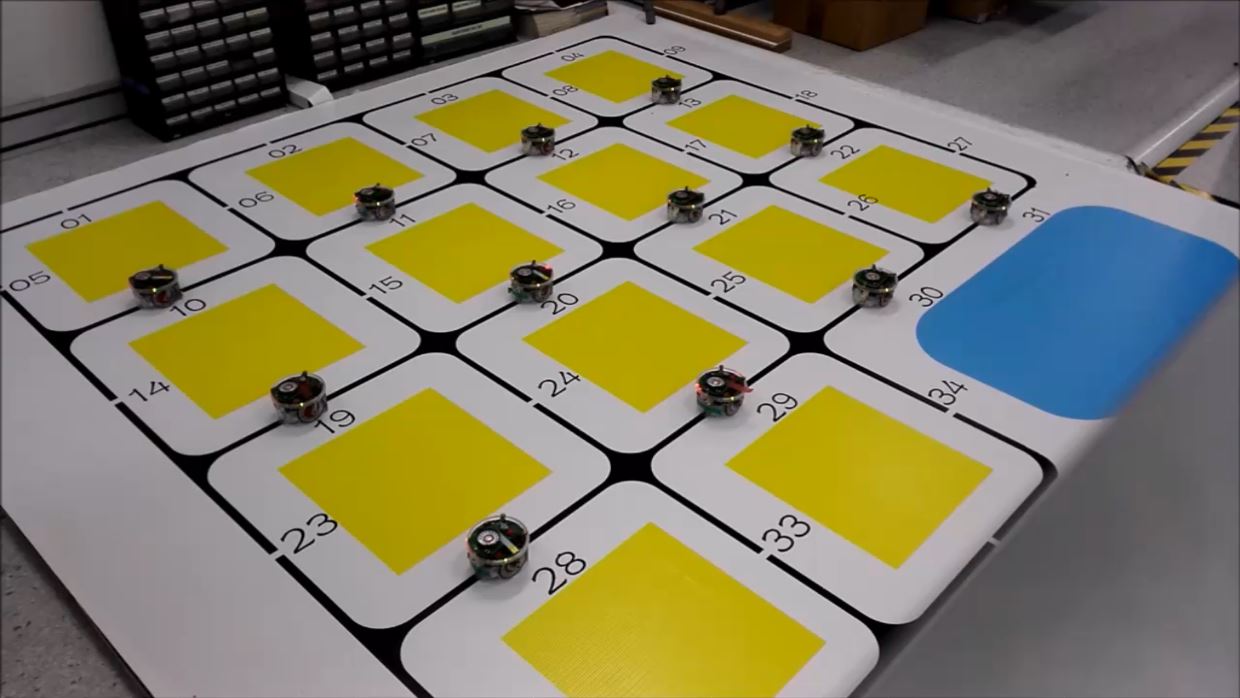
Developed a novel fault-tolerant AGV fleet management framework and tool.
AGVs are modelled as Timed Discrete Event Systems.
Schedules are synthesized in an incremental manner.
Paths are plotted for each AGV in priority order.
High priority AGVs are treated as moving obstacles for low priority AGVs.
Contributions
For AGV fleet management, we have developed two different strategies.
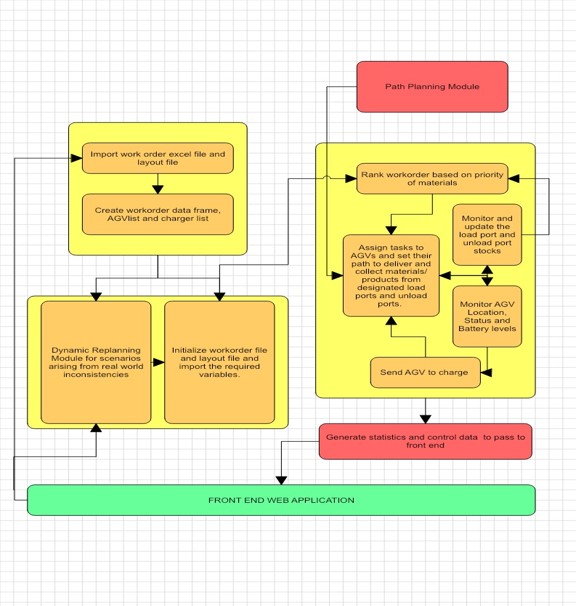
Heuristic scheduling
The first one is a heuristic strategy, which includes the following functional modules.
 |
|
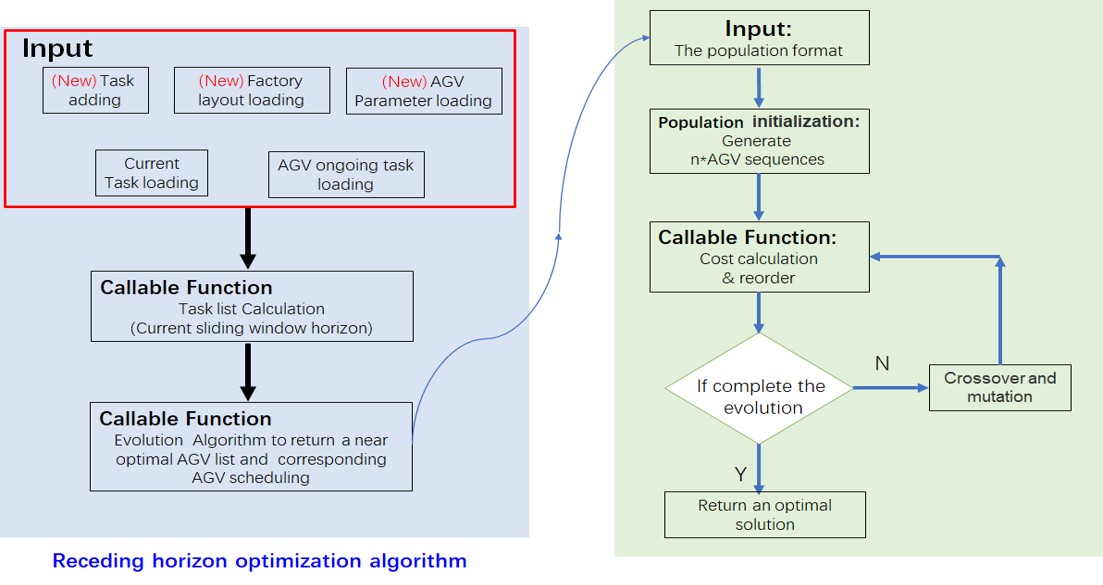
Real-time scheduling
The second strategy is based on real-time optimization.
A generic mathematical programming formulation is developed to capture key operational constraints in a typical AGV production system, and allows users to adjust the cost function according to their actual needs.
 |
|
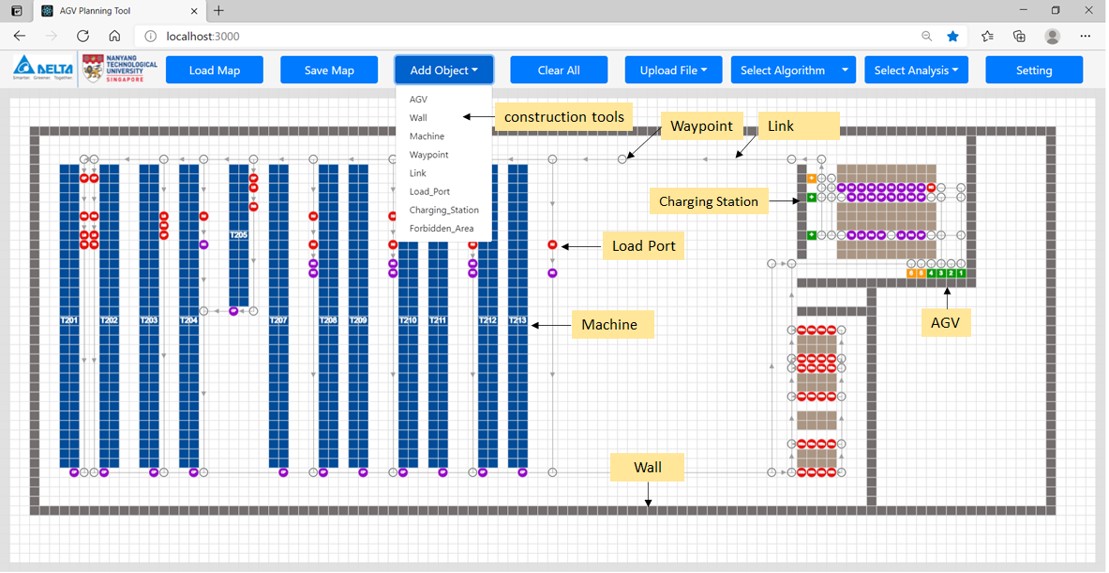
AGV fleet management tool
An AGV fleet management tool is developed featuring the following functional modules.
 |
|
Data visualization tool
The data visualization module allows users to monitor the real time data of AGV battery level, load port stock level and work order completion status etc.
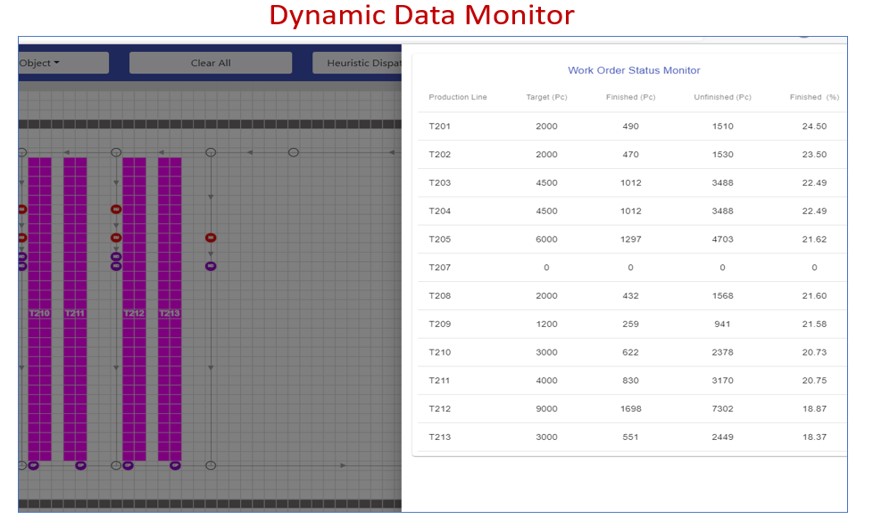 |
Real-time data monitor: |
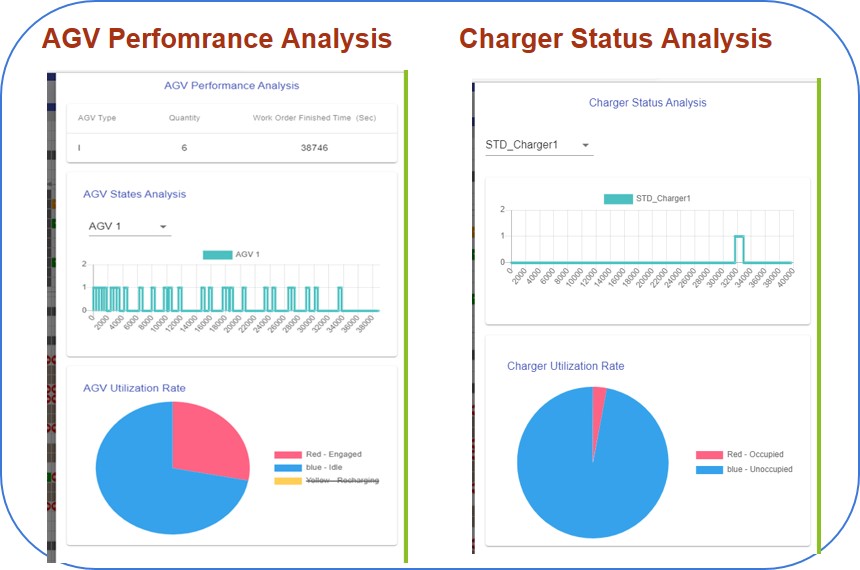 |
Peerformance analysis tool: |
Dynamic planning architecture
To illustrate the effectiveness of two aforementioned AGV dispatching and scheduling strategies in real operations, a separate disturbance generator module has also been developed to simulate real operational environments.
In field operations, when there is any external disturbance on AGVs or machines, the disturbance message will be sent to the AGV Fleet Management tool via MQTT (an IoT protocol) which may trigger system replanning afterwards.
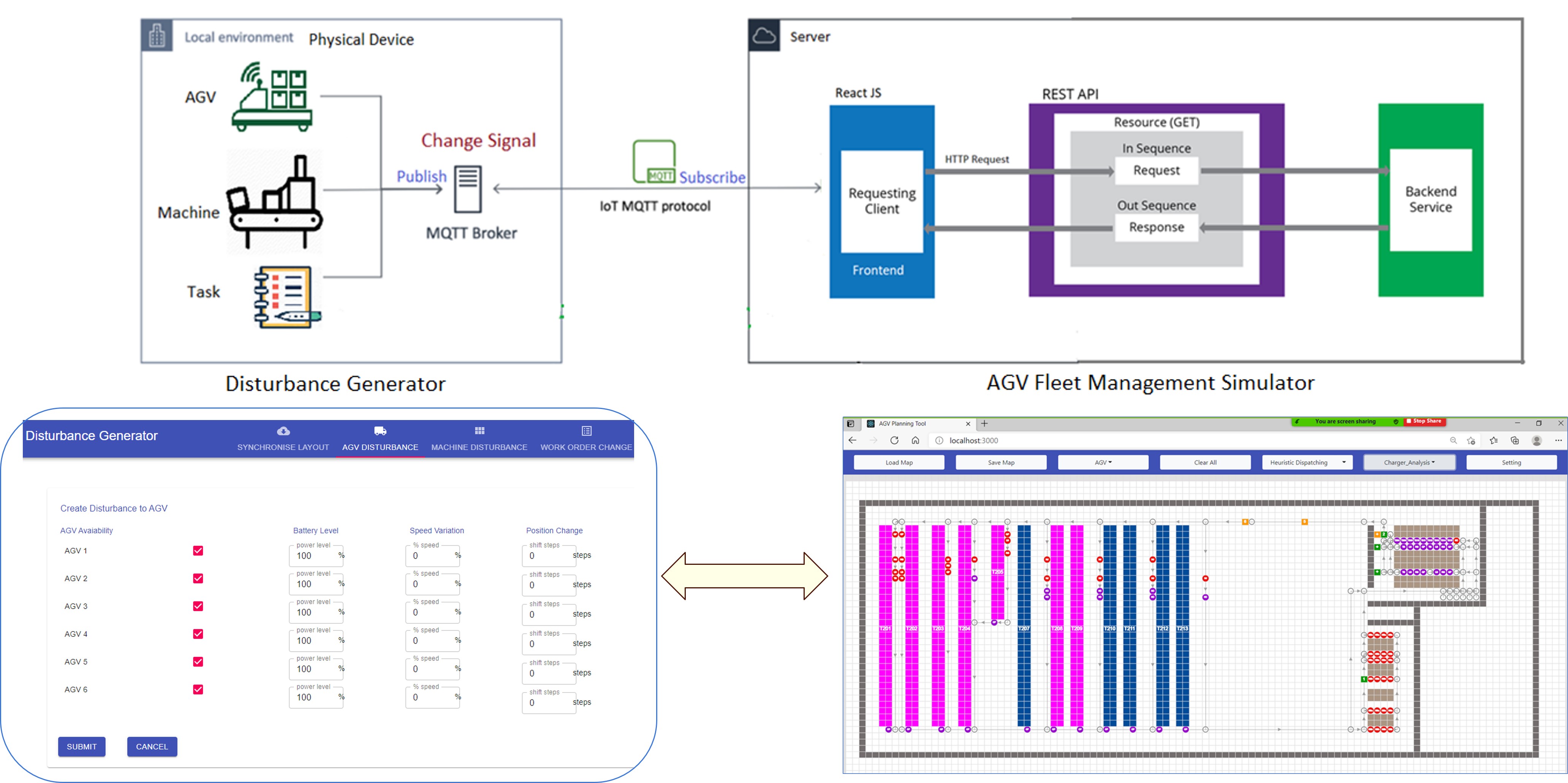 |
|
References
-
D. Deplano, S. Ware, R. Su, A. Giua. (2017). A heuristic algorithm to optimize execu- tion time of multi-robotic path. Proc. 13th IEEE International Conference on Control and Automation, pp. 909-914, Ohrid.
-
S. Ware, R. Su. (2017). An application of incremental scheduling to a cluster photolithog- raphy tool. Proc. IFAC World Congress 2017, pp. 1137-1143, Toulouse.
Hagebring, Fredrik and Wigström, Oskar and Lennartson, Bengt and Ware, Simon Ian and Su, Rong, “Comparing MILP, CP, and A* for multiple stacker crane scheduling.” Discrete Event Systems (WODES), 2016 IEEE 13th International Workshop: 63-70.
Ware, Simon and Su, Rong, “Incremental scheduling of discrete event systems.” Discrete Event Systems (WODES), 2016 IEEE 13th International Workshop: 147-152
-
S. Sami, L. Lin, A. Shehabinia, R. Su. (2014). Discrete-event based vehicle dispatching and scheduling in multicommodity transportations. In Proc. 13th International Conference on Control, Automation, Robotics and Vision, pp. 169-174, Singapore.