|
Driver Cut-in Behavior
Summary
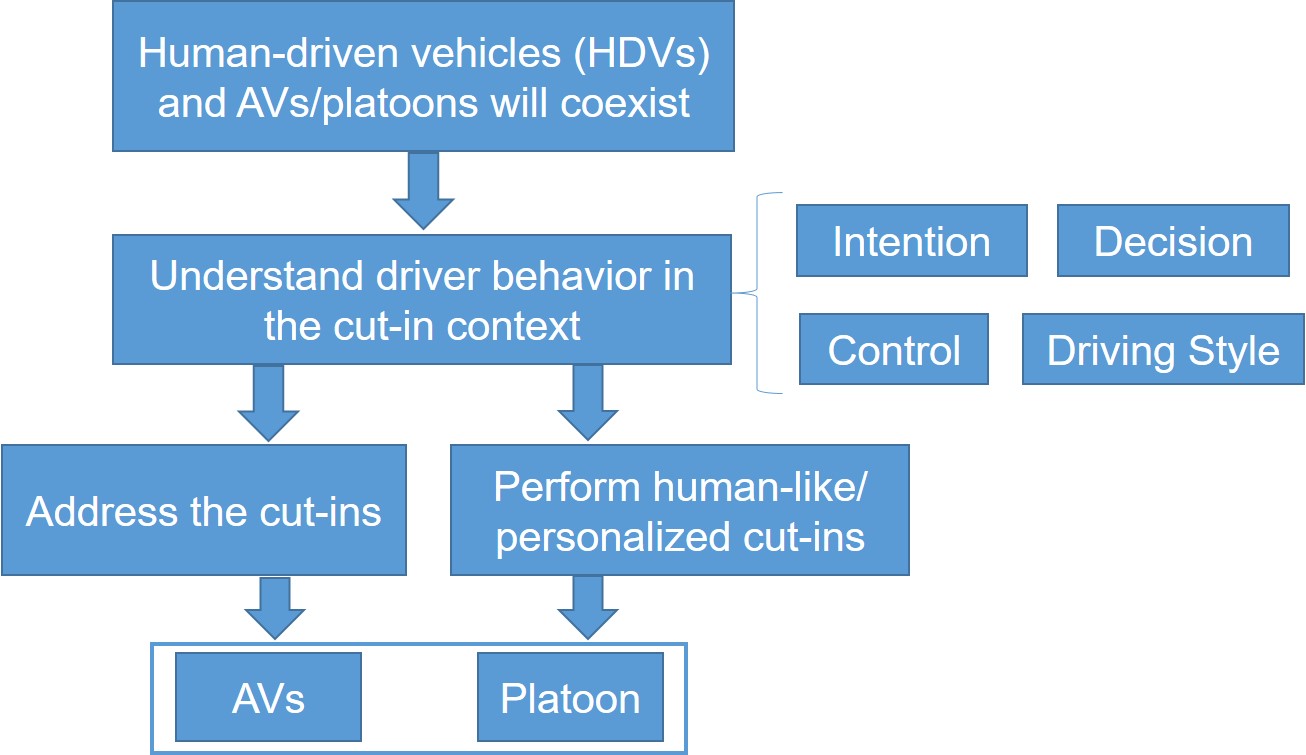 |
To understand and simulate driver's cut-in control behaviors, we propose a platoon-oriented cut-in behavior model.
To understand and simulate the driver decisions on whether to continue the cut-in and when to execute the lane-change during the cut-in process, we propose a two-layer prediction-based decision model.
To handle cut-ins, we propose an intention prediction-based control method for the VPs by considering the tradeoff between the platoon integrity and traffic safety.
We investigate how to classify and analyze the driving style of the cut-in process.
|
Contributions
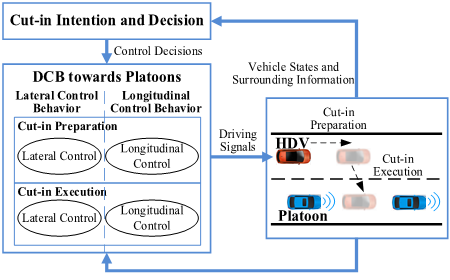
Modeling of Driver Cut-in Control Behavior towards a Platoon
 |
-
Research objective: to mimic driver's cut-in control behaviors towards a platoon.
Novelties: (1) The 1st work on lane-change against a platoon, vs one vehicle in car-following model or none vehicle in steering model by STOA; (2) Personalized human-like ADAS.
Modeling idea: We build a combined model by integrating a lateral and a longitudinal control model into the QN cognitive architecture
|
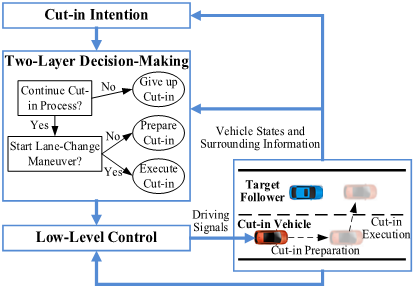
Modeling of Driver Cut-in Decision Behavior Considering Driving Style
 |
-
Research objective: 1) to model drivers decisions on whether to continue the cut-in/ when to execute the lane change; 2) to represent different decision driving styles
Novelties: The 1st work investigating driver decision behavior in the cut-in process
Modeling idea: we build a two-layer prediction-based decision model by combining a dynamic prediction module, a continuity decision module, and an execution decision module.
|
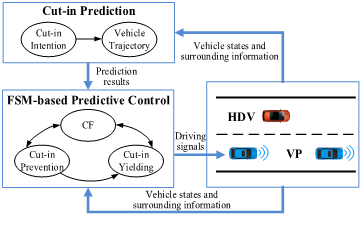
Intention prediction-based control for platoon to handle driver cut-in
 |
-
Research objective: to control the platoon to prevent cut-ins while keeping road safety.
Novelties: (1) The 1st work considering the tradeoff between platoon efficacy and road safety; (2) The 1st work incorporating the prediction of the driver intention
Cut-in prediction part: a SVM-based algorithm is designed to predict the cut-in intention of human drivers; a trajectory prediction algorithm is used to predict the trajectory of the HDV
FSM-based predictive control part: an FSM and an MPC algorithm are built to implement the control objectives of the proposed method.
|
Clustering and Analysis of the Driving Style in the Cut-in Process
 |
-
Research objective: to help identify and simulate the cut-ins with different driving styles.
Novelties: The 1st work to analyze the driving style of the cut-in behavior
The principal component analysis (PCA) and t-distributed stochastic neighbor embedding (t-SNE) methods are employed to reduce
the dimensionality of the features. The k-means++ algorithm is applied to cluster the driving style of the cut-ins.
|
Reference
Y. Lu, R. Su, L. Huang, J. Yao, Zhijian Hu. (2023). Modeling driver decision behavior of the cut-in process. IEEE Transactions on Intelligent Transportation Systems, DOI:10.1109/TITS.2023.3330061.
Y. Lu, L. Huang, J. Yao, R. Su. (2023). Intention prediction-based control for vehicle platoon to handle driver cut-in. IEEE Transactions on Intelligent Transportation Systems, vol. 24, no. 5, pp. 5489-5501
Y. Lu, B. Wang, L. Huang, N. Zhao, R. Su. (2022), Modeling of driver cut-in behavior towards a platoon. IEEE Transactions on Intelligent Transportation Systems, vol. 23, no. 12, pp. 24636-24648
H. Xiao, Y. Lu, R. Su, B. Wang, N. Zhao, Z. Hu. (2023). Clustering and analysis of the driving style in the cut-in process. 26th IEEE International Conference on Intelligent Transportation Systems, Bilbao
|